当前,具身智能研发面临 “双重枷锁”:真机验证成本高、风险大且仿真有偏差,制约策略验证效率;海量真机数据未形成高效利用机制,限制模型进化。为此,智元机器人在去年发布的具身 4D世界模型EnerVerse基础上,迭代推出全球首个基于机器人动作序列驱动的具身世界模型 EVAC(EnerVerse-AC),并配套发布全球首个具身世界模型评测基准 EWMBench。两大成果已全面开源,构建起从训练到评测的全链路闭环,致力于打造“低成本模拟-标准化评测-高效迭代”的全新开发范式,为全球具身智能研究注入动力。
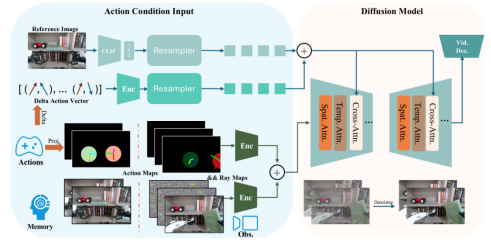
EVAC作为一款能够动态复现机器人与环境复杂交互的世界模型,标志着具身智能从传统仿真迈向生成式模拟的重要跨越。它的核心能力体现在多个方面,首先是物理动作与像素的高精度对齐,通过将机械臂 6D 位姿(x,y,z,roll,pitch,yaw)与末端执行器行程投影为 action map,实现了 “抓取”“放置”“碰撞”“推拉” 等复杂动力学行为的像素级精准建模。其次是动态多视图建模,引入Ray Map编码相机运动轨迹,支持头部、腕部等多视角协同生成一致连贯的视觉场景,让机器人具备更全面的环境感知能力。
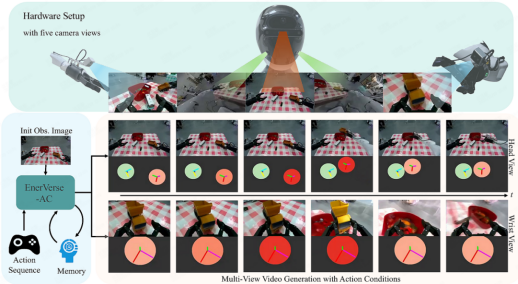
同时,它拥有卓越的长时序一致性,采用Chunk-Wise自回归扩散架构与稀疏记忆机制(Sparse Memory),EVAC能够实现单视图稳定生成长达 30 个连续片段,多视图下也能维持 10 个连续片段的无漂移输出,保证了模拟过程在时间上的连贯性与真实性。另外,在数据高效利用方面,EVAC 融合了 Agibot-World 数据集与失败轨迹(如抓取滑脱、路径碰撞),有效抑制了模型幻觉,使机器人与环境的交互动态建模更加合理、全面。
EVAC 的价值主要体现在 “生成式仿真评测 + 数据引擎” 的双轮驱动上。针对真机评测成本高、风险大、难以复现等痛点,EVAC开创性地提出了生成式模拟评测方案,它能与待评测的策略模型进行交替推理,构建起一套完整的交互式评测管线。
目前,EVAC 已成为全球顶尖机器人赛事 AgiBot World Challenge @ IROS 2025 的 baseline 之一。这两大成果的全面开源,不仅为研究者提供了可直接复用的技术底座,更将推动 “算法 - 评测” 协同进化的行业新范式,加速具身智能技术的落地与产业发展。智元机器人表示,将继续践行在具身智能生态中的创新与协作,通过开源技术为全球研究提供支持,引领具身智能迈向更高效、更普适的未来。