���գ���Ԫ�������ھ�����������ʵ��˫�ؼ���ͻ�ƣ���ʽ��Դȫ���������˶�����������������ģ�Ϳ��EVAC��EnerVerse-AC������������ģ�������EWMBench���˾ٱ�־����Ԫ���ƽ���ҵ“�����֤�ɱ��ߡ���������Ч�ʵ�”��˫��������ȡ�ùؼ���չ����ԪΪȫ���߹�����“�ͳɱ�ģ��-��������-��Ч����”��ȫ���з���ʽ�������ƶ��������ܼ�������Эͬ�����½Ρ�
��ǰ�������ܷ�չ�����������ƿ����һ���棬��֤�ɱ�����������Դ���������Ӳ������밲ȫ���գ�����ͳ����ϵͳ����“��ʵƫ��”���Ծ����ָ��ӵ������������̡���һ���棬���ݼ�ֵ����û��������������켣��δ�������Ч���������ƣ�����ģ��ѵ�����ݶ��������ز��㣬��Լ��ģ��������������Ԫ�����˾���Ϥ��Щ��ҵʹ�㣬�������е�EnerVerse����ģ�ͼܹ��������£��Ƴ���EVAC�����EWMBench��������γ���һ���Ǵ�ģ��ѵ����Ч��������ȫ��·�ջ����������
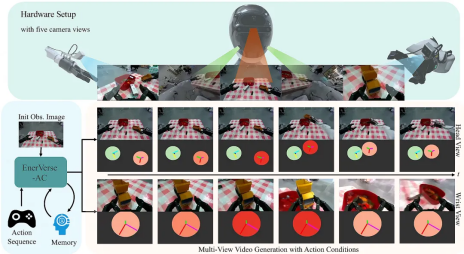
��Ϊ��Ԫ�������з���ȫ���״�������EVAC���ʵ��������-���ؾ�ӳ�䡢��̬����ͼ���ɡ����ݼ�ֵ��ȼ�������߸��Դ��¡�ͨ�����µ�6D��е��λ����ĩ��ִ�����г̵�ActionMap���뼼����ʵ���˻����˶��������ؼ��Ӿ���̬�Ķ˵��˾�ȷ���룬�ü����ܹ�����ģץȡ����������ײ�ȸ��Ӷ���ѧ��Ϊ�����Ҽ����˴��µ�RayMap����켣���뼼����֧��ͷ��/�ȶ��ӽdz�����Эͬ���ɡ��ڳ�ʱ��һ���Է���ȡ��ͻ�ƣ�����ͼ���ȶ����ɳ���30�ε��������棬����ͼҲ��ά��10�ε���Ư�������EVAC����ں���Agibot-World���ݼ��Լ�ץȡ���ѵ���ʵʧ�ܹ켣����ѵ����ʵ������֤ʵ������EVAC��������ѵ���IJ���ģ�ͣ�������ɹ��ʿ������ߴ�29%��

Ϊ�˽�����������ģ�͵�Ȩ������������Ԫ�Ƴ���ȫ���������EWMBench�������������������������ά������������ϵ�ϡ��ڳ���һ���Է��棬EWMBenchͨ����DINOv2ģ�ͣ������������ɳ��������塢�������ӽǵ��ȹ�������ʵ�ȡ��ڶ��������Է��棬�ۺ�����HSD��nDTW������ѧ���������ָ�꣬��ȷ���������켣�������������������ԡ����������������Է��棬��϶�ģ̬��ģ�ͣ�MLLM����CLIP��������ȫ��ָ�����⡢�ؼ���������ȷ�ԡ��������Եȶ��ν������������
EWMBenchӵ�и�ֵ������֧�š��乹�������ǰ���Դ������ݼ�Agibot-World�������˼Ҿӡ���ҵ��ҽ���������Ӧ�ó������û�����10����ͻ����˲��������漰���塢���塢���弰�ؽ�����ȶ��ֽ�������ͬʱ��EWMBench�����˳���300��ר���������������30%ר����Ե��ա������ڵ��ȼ�����ս�Եij���
��Ԫ�����˹�����“EnerVerse X EVAC X EWMBench”�����������γ�ǿ��ıջ�����ЧӦ������EVAC�����EWMBench����ȫ�濪Դ����Ԫ�����˳ɹ���ͨ�˾�����������“�㷨-����”Эͬ�����Ĺؼ�·�����ⲻ�����������ģ����֤�ɱ�������ͷ�������ݵľ�DZ�����������ƶ�ȫ���з��߹�����Ч�����ʵľ�����������̬��